À propos de mon travail
Ma formation et mon parcours professionnel en informatique m’ont permis de développer un sens de l’analyse qui constitue aujourd’hui le cœur de mon projet.
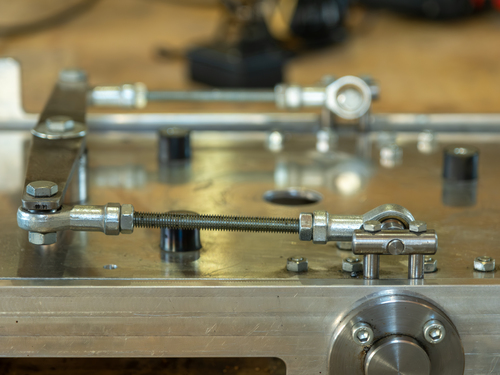
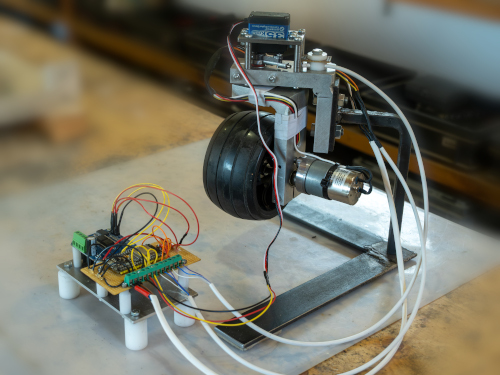
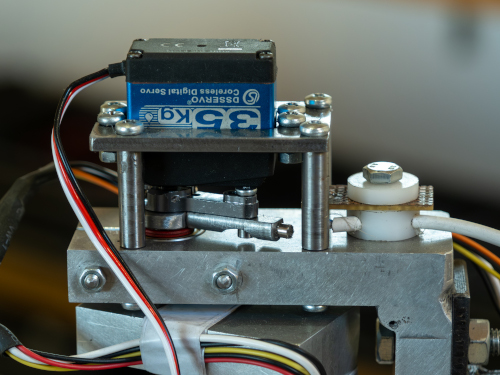
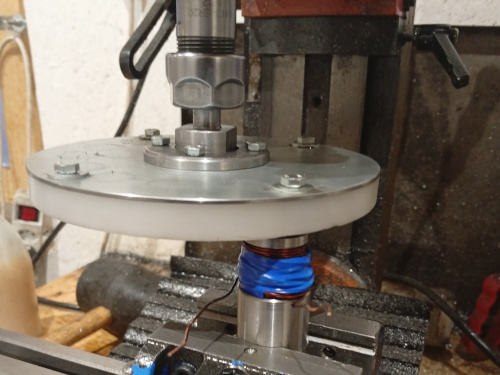
Aujourd’hui, je concrétise le concept présenté sur la première page à travers un prototype à l’échelle 1/5. Ce prototype a deux buts principaux : tester et valider les idées, puis, une fois fonctionnel, le présenter à toute personne intéressée par le projet.
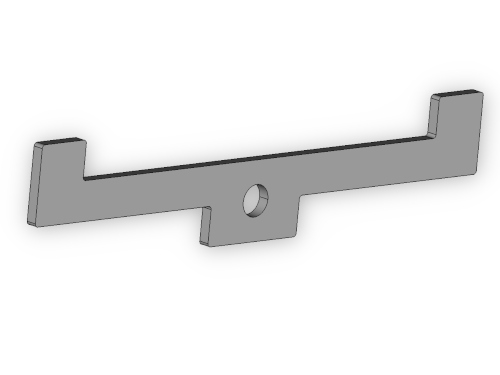
Mon activité se déroule sur deux sites : au bureau, où je réalise l’analyse, le dessin technique et la programmation ; et dans un atelier spécialement aménagé, où je fabrique les pièces mécaniques, effectue les montages électroniques et procède aux assemblages.

Marc Dumas